Progetti
AGE-IT Spoke 9
Funded by: PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR) – MISSIONE 4 COMPONENTE 2, “Dalla ricerca all’impresa” INVESTIMENTO 1.3, Creazione di “Partenariati estesi alle università, ai centri di ricerca, alle aziende per il finanziamento di progetti di ricerca di base”
The project objectives are to identify neurophysiological and kinematic features of static and dynamic balance with & without a lower limb exoskeleton. In parallel, we will develop a set of psychometric measures to test embodiment and user’s acceptability. The multidisciplinary team, merging neurophysiological, rehabilitation, engineering & robotics, and neuropsychological expertise , will ensure the design of innovative technologies to boost motor performance and reduce loss of balance in the elderly and address the neglected issue of embodiment in wearable robotics.
REBALANCE
REinforcing BALANCE with a neurally-driven wearable assistive device (PRIN: PROGETTI DI RICERCA DI RILEVANTE INTERESSE NAZIONALE – Bando 2022 Prot. 2022YPK5YB)
The project aims to reduce falls and related healthcare and social costs in the elderly. To tackle this pressing problem, two top-end Italian universities will collaborate developing an innovative, low-cost, neurally-driven, wearable assistive device (WAD) to prevent loss of balance (LoB), a prodromal sign of an incipient fall, in ecological environments. In this project, the WAD will be deployed as a rehabilitative tool in conjunction with an active balance board, to reinforce balance control based on individual cerebral, muscular, and kinematic responses.The expected results will translate in advancement of scientific and technical knowledge and economic impact in terms of reduction of LoB and market access of the end products.
IntelleEXO
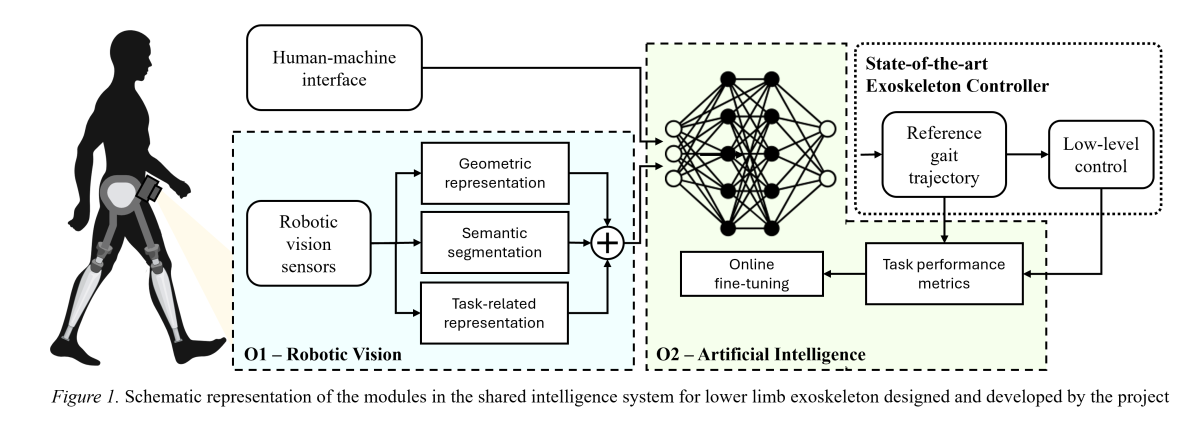
In this project, we propose to implement and demonstrate a novel shared intelligence approach for the semi-autonomous control of an assistive exoskeleton. Shared intelligence refers to an innovative approach in Human-Robot Teaming (HRT) in which the user and the robot equally cooperate in achieving a high-level task, by concurrently fusing user’s inputs and robot’s perception. In particular, we will consider a use case related to the mobility of people with motor impairments: assisted walking with an intelligent lower limb exoskeleton in both indoor and outdoor environments. The exoskeleton will thus be capable of dealing with different terrains encountered in real world scenarios, such as flat-ground, slopes and stairs, as well as overcoming unexpected situations, such as the presence of low obstacles along the walking path. In this project, we will demonstrate shared intelligence in the challenging scenario of an intelligent exoskeleton, but the technology will be applicable to other assistive robots.
ARMS
This study aims to track the pattern of functional recovery of upper and lower limbs in people with stroke to improve rehabilitation interventions. Quantification of motor deficits requires the integration of clinical measures and instrumental approaches. The study will monitor motor recovery trajectories with clinical scales and quantitative measures, using noninvasive magnetic stimulation techniques (motor evoked potentials, reticulospinal tract excitability) and kinematics with inertial sensors - IMUs- as markers of recovery prognosticators.
The primary objective is to compare these parameters in people with stroke in the acute phase, at one month and three months after the episode. The strongly interdisciplinary focus, combining clinical expertise in neurorehabilitation, biomechanics, and biologic signal analysis, ensures a broad view of the probelmatics addressed
AMBIENTE
The goal of this longitudinal interventional study is to integrate the enriched environment (EE) in the context of the Neurology Clinic ward of the General Hospital - University of Padua, by verifying its effectiveness and impact on psychological well-being, functional recovery, activity level, and quality of life in people with stroke. The EE will be integrated within the shared areas of the Neurology ward and in inpatient rooms, providing materials and aids to encourage physical, cognitive and social activity. The study will recruit for 9 months plus 6 months of follow-up. It will recruited a total of 50 people with stroke (25 for experimental and control group). After providing informed consent, participants will be evaluated on admission, at discharge, at 4 weeks (follow-up phone interview) and at 6 months (telephone interview). Participants will be psuedo randomized, as the ward will be environmentally enriched during consecutive alternating time frames. The instrument used to measure the multidimensional recovery will be the Stroke Impact Scale. Specific secondary outcomes will assessed the recovery in motor, cognitive and communication function, the impact on physical activity, mood, the type of activity of participants exposed to EE and the impact on the ward organization.
PAST PROJECT
PROGAIT
Co-Funded by European Commission Horizon 2020 Programme H2020-MSCA-RISE-2017 Grant n.778043
Physiological and rehabilitation outcomes gains from automated interventions in stroke therapy
Local Investigator: Alessandra Del Felice
PI: Olive Lennon - University College Dublin
Developments in robotics allow people with profound neuromuscular deficits after stroke to walk with assistance (during the gait cycle) using an exoskeleton robot. Integrating a robotic device with individualised user electroencephalography (EEG /electrical activity in the motor areas in the brain) and EMG (muscle)feedback would allow more physiological and targeted gait parameters in response to effort, and confer neuroplastic training effects including neuromodulation of temporal and spatial features of gait.
Future integration of EEG/EMGsignals with robotic devices will allow patient initiated movement through thought and/or attempted effort, where currently parameters for devices are therapist set and usage is not functionally driven by the patient. Advancement in this regard is stalled primarily because of difficulty in 3D modelling of gait by EEG.
This collaborative consortium through secondments and return and built in knowledge sharing strategies will exchange knowledge and expertise across: Design, development and production of exoskeleton gait devices; neuro-rehabilitation; bioelectric EEG/EMG signal capture and interpretation; mathematical modelling and brain computer interface (BCI) platform development can advance the state of the art in gait rehabilitation after stroke rehabilitation. The proposal will allow development of 3D modelling of gait, for gait restoration and explore integration with robotics from multi-stakeholder perspectives. Aims:
1. Define current state of the art in EEG modelling of gait post stroke by systematic review and meta-synthesis;
2. Complete 3D modelling of gait as visualised gait, overground gait and robotic walking in healthy individuals and stroke survivors;
3. Develop and test a virtual reality BCI gait training device, including end-user feedback;
4. Explore integration of this prototype with robotic software platforms.
Website: www.progait.eu
SoftAct
Funded by: Ministry of Affari Esteri e della Cooperazione Internazionale NUMBER-PGR00807
Prevention of falls: a synergic soft exoskeleton with integrated muscle and brain biosignals to minimize gait instability in the elderly
PI: Alessandra Del Felice
Gait performance and posture can be affected by aging. Falls due to lack of stability is one of the most common causes of injury and disability in the elderly. Multiple causative factors concur; older people are usually not aware of these risks and they do not report them to physicians. As a consequence, prevention of falling is often overlooked and technological solutions are proposed to detect the fall itself. The aim of this 3-y project is to develop a novel neuromuscular controller for a soft lower-limb exoskeleton to detect the loss of stability during walking or standing and apply the proper torques to restore stability. The project is structured on two consecutive phases: an offline acquisition of kinematic, cerebral activity and muscular signal during over-ground gait and during postural adjustments induced by an instrumented balance platform, and an online implementation of the closed-loop controller for detecting and preventing falls. At the end of the project, we expect to deliver a robust and efficient system, that should increase the stability and the safety of elderlies, with possible commercial exploitation.
Poster presented at The Hamlyn Symposium on Medical Robotics 2019 (London, UK).
DISCO
Funded by: Crowdfunding UNIPD
DIsturbi psico-patologici, cognitivi e del SOnno in sopravvissuti COvid-19.
PI: Alessandra Del Felice
ITA: Il progetto vuole studiare la prevalenza degli effetti a lungo termine a carico del sistema nervoso centrale in un campione di soggetti negativizzati e dimessi a domicilio dopo infezione da COVID-19. I soggetti verranno monitorati clinicamente e strumentalmente: verrà quantificata l'attività cerebrale a riposo e durante il sonno, i sintomi affettivi (es. depressione) e le funzioni cognitive (es. attenzione/memoria/funzioni esecutive).
EN:The project aims at identifying long-term central nervous system (CNS) sequelae in people who recovered from COVID-19. We will follow-up with clinical, neuropsychological and neurophysiological investigation this cohort.
web.unipd.it/covid19/ricerca
IntelleEXO In this project, we propose to implement and demonstrate a novel shared intelligence approach for the semi-autonomous control of an assistive exoskeleton. Shared intelligence refers to an innovative approach in Human-Robot Teaming (HRT) in which the user and the robot equally cooperate in achieving a high-level task, by concurrently fusing user’s inputs and robot’s perception. In particular, we will consider a use case related to the mobility of people with motor impairments: assisted walking with an intelligent lower limb exoskeleton in both indoor and outdoor environments. The exoskeleton will thus be capable of dealing with different terrains encountered in real world scenarios, such as flat-ground, slopes and stairs, as well as overcoming unexpected situations, such as the presence of low obstacles along the walking path. In this project, we will demonstrate shared intelligence in the challenging scenario of an intelligent exoskeleton, but the technology will be applicable to other assistive robots. We aim at enhancing the cooperation and integration of user’s and robot’s actions through innovative methodologies based on AI. On the one hand, we will enrich the robot’s perception, generally based only on geometric features (e.g., occupancy grid), with a more human-like representation of the environment assigning semantic and task-related meaning to the surrounding of the robot, such as “walkable” or “non -walkable” ( Objective O1). On the other hand, we devise an approach that does not rely on pre-coded robotic behaviors or a known dynamics model of the human-robot interaction. Instead, the robot's behavior will emerge through an end-to-end AI model that learns the contextualization of the user's inputs with the robot's perceptions directly from the recording of human-robot interactions (Objective O2). As a result, the robot will not only assist the user at the operational level, but it will exhibit proactive behaviors in identifying the common goal of the task in tandem with the human operator. To showcase the effective applicability of the proposed shared intelligence approach to real robotic devices, extensive experimental validations will be carried out to demonstrate the efficacy of the proposed shared intelligence approach with healthy users. In addition, a proof-of-concept demonstration with a real end-user (e.g., post-stroke patient) will be performed to further analyze its usability. Our approach based on shared intelligence aims at an innovative teaming between human and AI that will promote a symbiotic interaction in which the human can seamlessly communicate his/her intent to the assistive robot (AR). This will foster theuptake of AR devices in complex scenarios, such as everyday home environments, that represent a game changer towards independence for those people suffering from severe motor disabilities, restoring mobility and interaction with relatives or friends. The aim of the project is definitely ambitious, but it is realistically grounded on the previous experience and results achieved by the project group on all the key aspects of the research project.